前言
传感器其标定时,需要用到标定板;可能是单传感器标定,例如:摄像头标定,获取内参。可能是多传感器之间标定,最近在做感知融合,需要激光雷达和摄像头标定,本文记录下使用matlab,来制作标定板。
一、编程基础
核心函数:checkerboard( )
使用方式有三种,分别如下:
- I = checkerboard;
- I = checkerboard(n);
- I = checkerboard(n,r,c);
含义解释: n是指每个格子的像素大小;r 是指行数;c 是指列数。
二、基本版——实现效果
2.1)I = checkerboard;
代码如下:默认创建一个8*8的矩阵,像素是10;
figure;
I = checkerboard;
imshow(I)其中,figure 是指创建一个面板,待会用来显示标定图;imshow(I) 就是显示的作用啦。
I 本质是一个矩阵;大小是80*80;用size函数可以查看的,即:size(I)
2.1)I = checkerboard(n);
代码如下:默认创建一个8*8的矩阵,像素是n,可以自由设定,但需要是正整数,比如20;
figure;
I = checkerboard(20);
imshow(I)
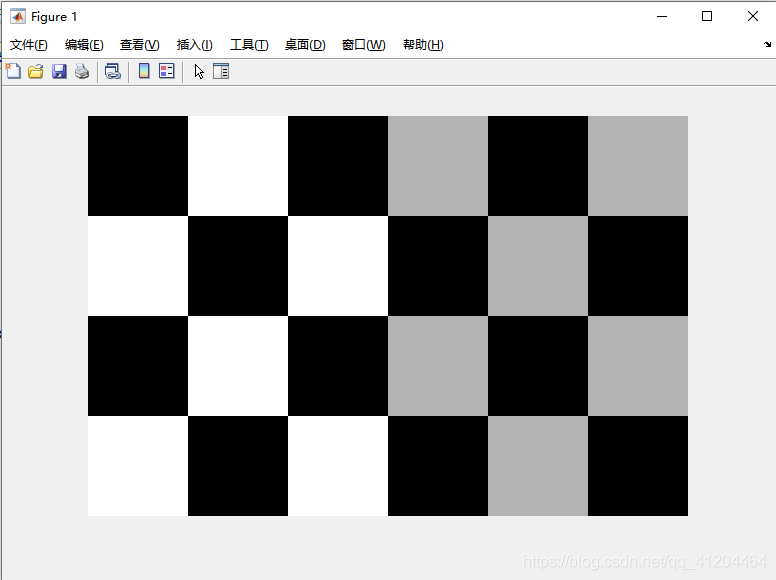
3)I = checkerboard(n,r,c);
![]()
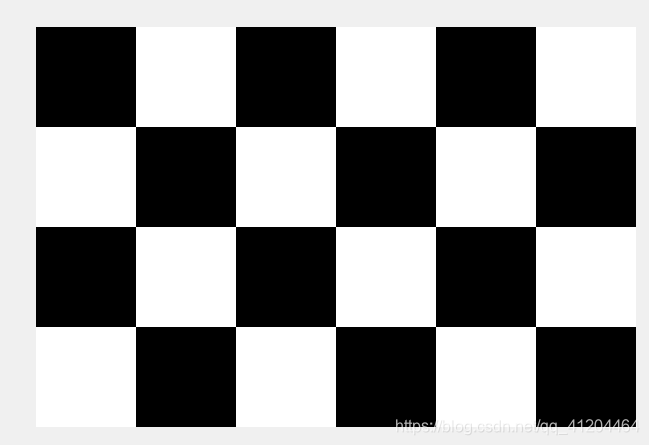
代码如下:创建一个黑色格子、白色格子哥2行3列的棋盘格,即4*6的矩阵,像素是100;
figure;
I = checkerboard(100, 2, 3);
imshow(I)
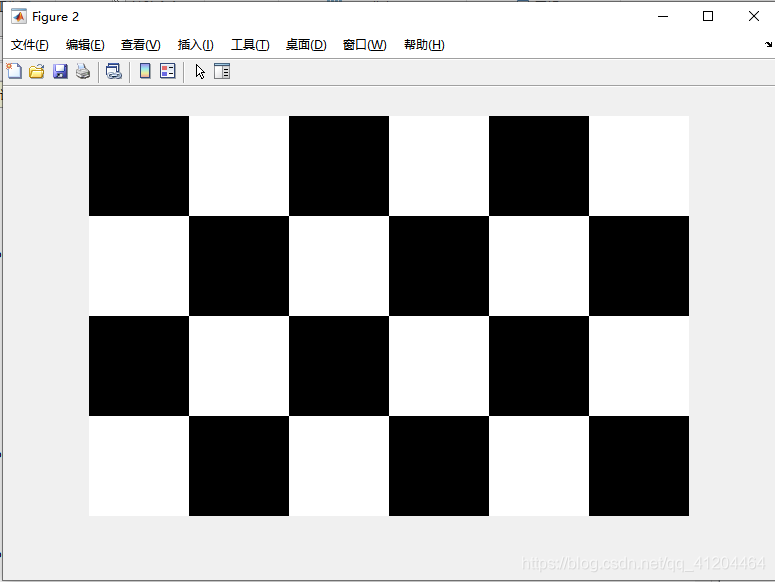
三、进阶版—消除灰色部分
创建一个黑色格子、白色格子哥2行3列的棋盘格,即4*6的矩阵,像素是100;没有灰色效果:
![]()
代码如下:
figure;
I = checkerboard(100,2,3);
K = (I > 0.5);
imshow(K);
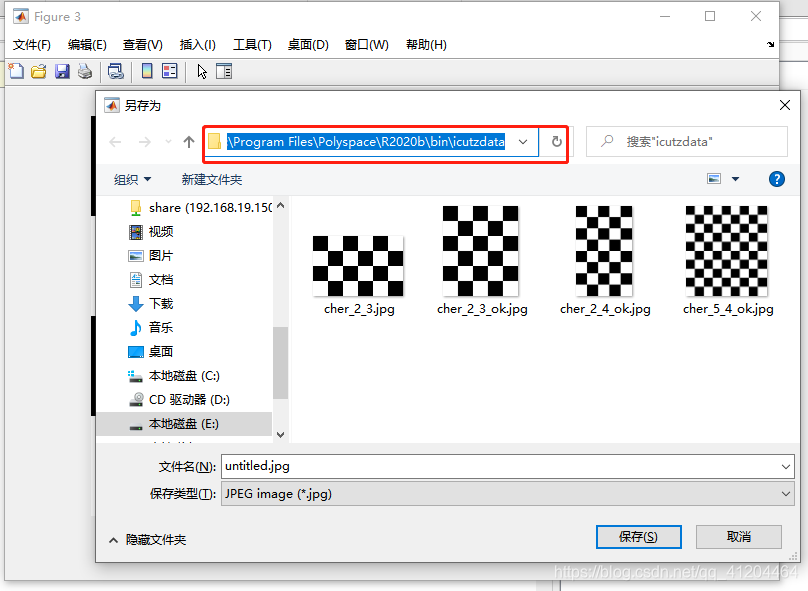
四、保存标定板
主要函数是:imwrite( )
代码如下:
figure;
I = checkerboard(100,2,3);
K = (I > 0.5);
imshow(K);
imwrite(K,'cher_2_3.jpg');保存标定板所在的位置,在显示的画面,点击另存为,就可以查看标定板保存的路径。
注意:使用imwrite( )函数保存生成的标定板图片;不要直接使用另存为的图片;如果问为什么?建议尝试一下,会发现另存为的图片,会改变原格式的,即标定板的像素被改变了。
![]()
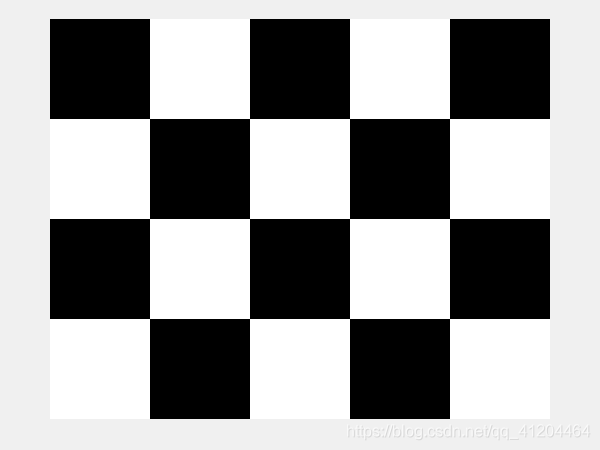
五、进阶版—符合规格的标定板
首先观察下这两个标定板的差别:
偶数 * 奇数;棋盘格中,其中一个边包含偶数个正方形,另一边包含奇数个正方形。
![]()
偶数 * 偶数;棋盘格中,其中一个边包含偶数个正方形,另一边也是包含偶数个正方形。
![]()
通常参考官方的指南,只能生成偶数 * 偶数 的棋盘格;看网上大多数的教程,都是这种。
官方标定板的指南:https://ww2.mathworks.cn/help/images/ref/checkerboard.html
但是,在标定工作中,对标定板是有要求的,比如需要:棋盘格标定板,其中一个边包含偶数个正方形,另一边包含奇数个正方形。方形图案可以为相机外在元素产生意想不到的结果。比如:标定板的方向可能检测不正确。
这个问题也困惑了我2个小时,才解决了,分享一下。
六、偶数 * 奇数棋盘格—标定板
明亮的一半是符合奇偶数边的要求;
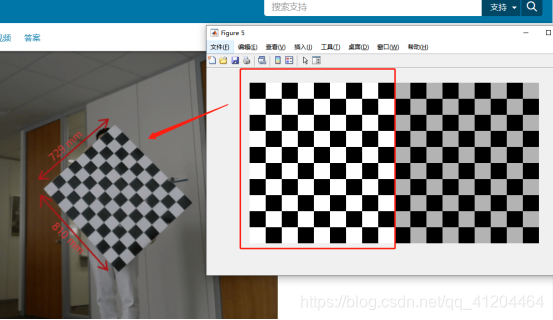
![]()
figure;
I = checkerboard(100,5,9);
imshow(I);
imwrite(I,'cher.jpg');先思考下,创建棋盘格的核心函数是checkerboard( );创建出来的对象,本质是一个矩阵;那就好解决啦,先观察矩阵规律,然后提取或分割就可以啦。
查看I的尺寸:(本来的大小)
>> size(I)
ans = 1000 1800
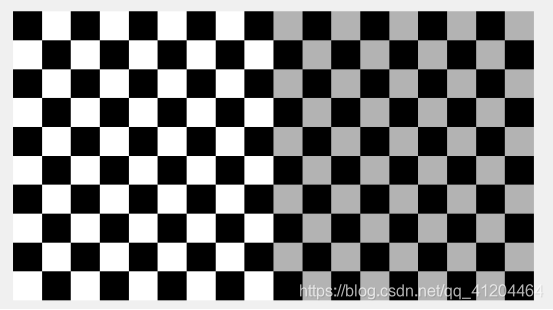
![]()
然后,截取矩形中的一半就可以啦。
分割出来
![]()
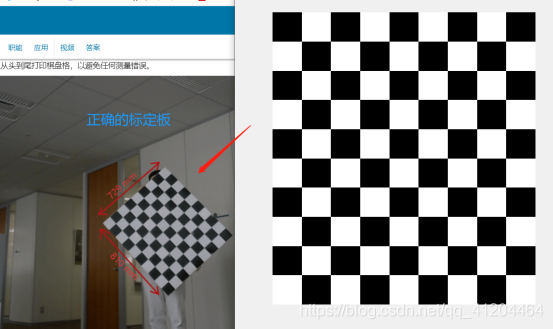
figure;
I = checkerboard(100,5,9);
imshow(I(:,1:900));
imwrite(I(:,1:900),'cher.jpg');
通用代码
生成10行 9列的棋盘格-标定板
boardsize = 100; % 每个格子大小,单位:像素
r = 10; % 行数
c = 9; % 列数
% 下面进行制止棋盘格
figure;
I = checkerboard(boardsize, r/2, c);
imshow(I(:,1:boardsize*c));
imwrite(I(:,1:boardsize*c),'cher.jpg');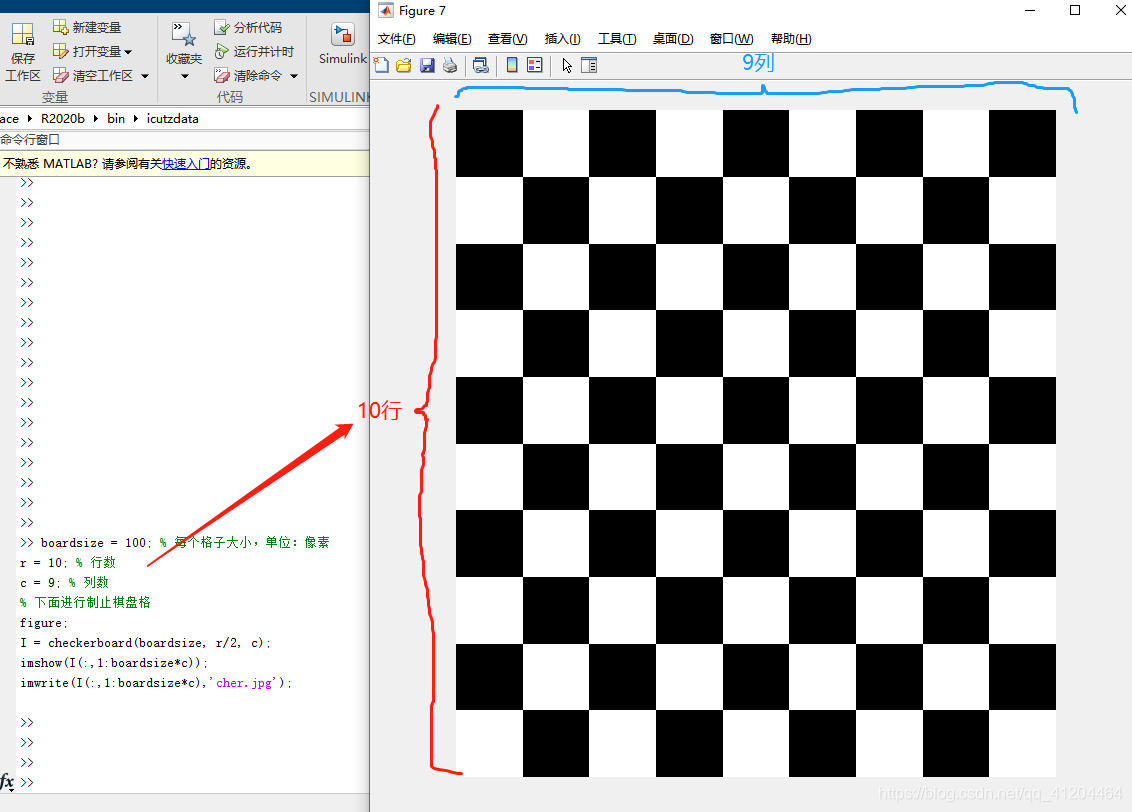
![]()
标定板符合matlab标准:
https://ww2.mathworks.cn/help/lidar/ug/lidar-camera-calibration-guidelines-and-procedure.html
A3纸大小,生成8行 5列的棋盘格-标定板
boardsize = 620; % 每个格子大小,单位:像素
r = 8; % 行数
c = 5; % 列数
% 下面进行制止棋盘格
figure;
I = checkerboard(boardsize, r/2, c);
imshow(I(:,1:boardsize*c));
imwrite(I(:,1:boardsize*c),'cher_8_5_ok.jpg');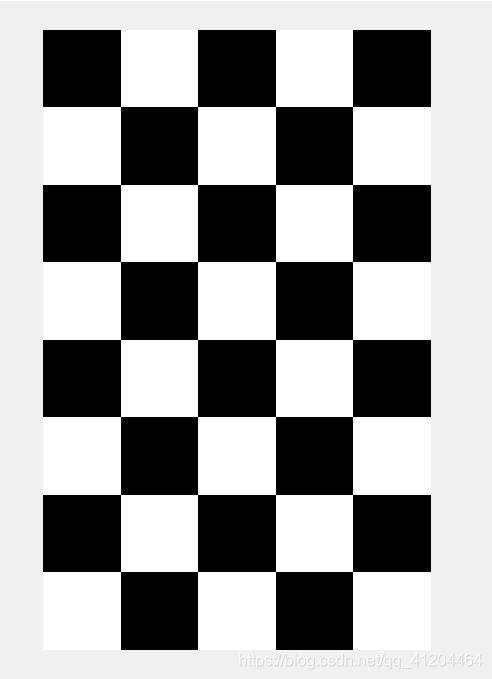
![]()
标定板符合matlab标准:
https://ww2.mathworks.cn/help/lidar/ug/lidar-and-camera-calibration.html
如果觉得不错点个赞啦;欢迎交流~