目录
1、步进电机的概念
步进电机是将电脉冲信号,转变为角位移或线位移的开环控制电机,又称为脉冲电机。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。当步进驱动器接收到一个脉冲信号时,它就可以驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”。
步进电机的旋转是以固定的角度一步一步运行的,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的,同时可以通过控制脉冲频率,来控制电机转动的速度和加速度,从而达到调速的目的。步进电机多用于数字式计算机的外部设备,以及打印机、绘图机和磁盘等装置。 具体使用可参见以下演示视频:
2、步进电机的特点
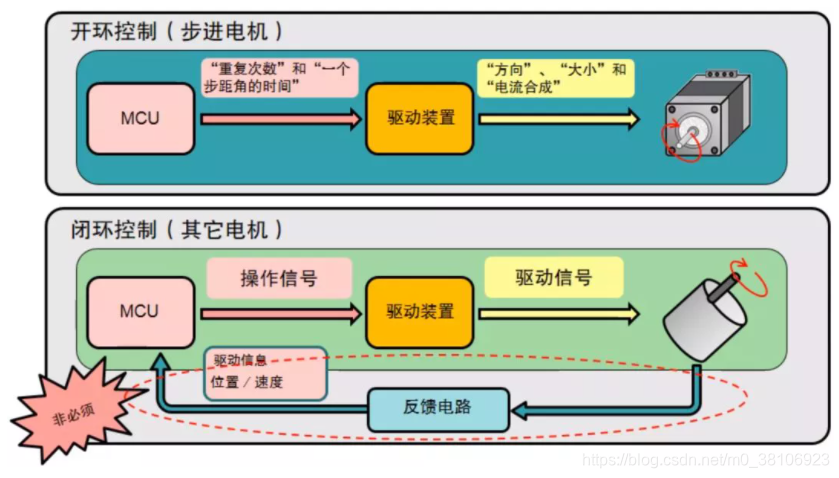
步进电机工作时的位置和速度信号不反馈给控制系统,如果电机工作时的位置和速度信号反馈给控制系统,那么它就属于伺服电机。相对于伺服电机,步进电机的控制相对简单,但不适用于精度要求较高的场合。
步进电机的优点和缺点都非常的突出,优点集中于控制简单、精度高,缺点是噪声、震动和效率,它没有累积误差,结构简单,使用维修方便,制造成本低。步进电机带动负载惯量的能力大,适用于中小型机床和速度精度要求不高的地方,缺点是效率较低、发热大,有时会“失步”。优缺点如下所示。
优点:
1. 电机操作易于通过脉冲信号输入到电机进行控制;
2. 不需要反馈电路以返回旋转轴的位置和速度信息(开环控制);
3. 由于没有接触电刷而实现了更大的可靠性。
缺点:
1. 需要脉冲信号输出电路;
2. 当控制不适当的时候,可能会出现同步丢失;
3. 由于在旋转轴停止后仍然存在电流而产生热量。
3、步进电机的分类
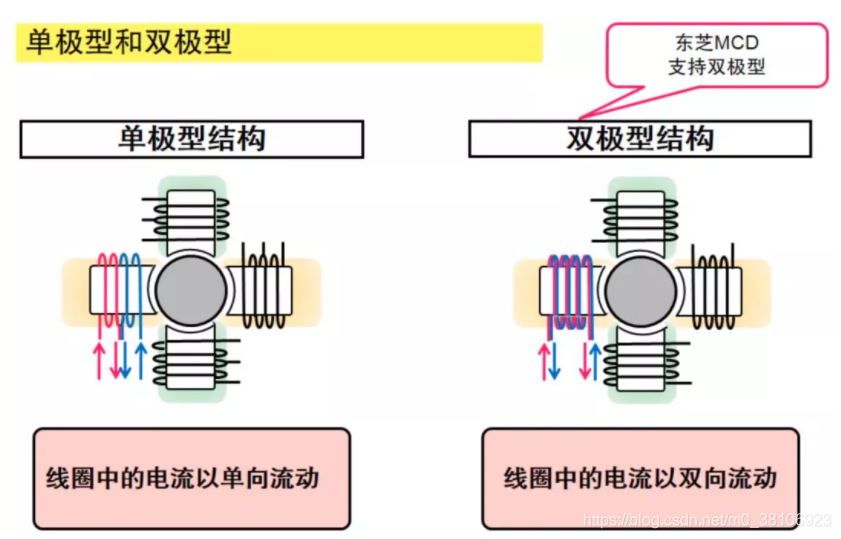
在相同电流且相同转矩输出的条件下,单极型步进电机比双极型步进电机多一倍的线圈,成本更高,控制电路的结构也不一样,目前市场上流行的大多是双极型步进电机。
步进电机在构造上通常主要按照转子特点和定子绕组进行分类,下面将详细介绍这两种类型的分类。
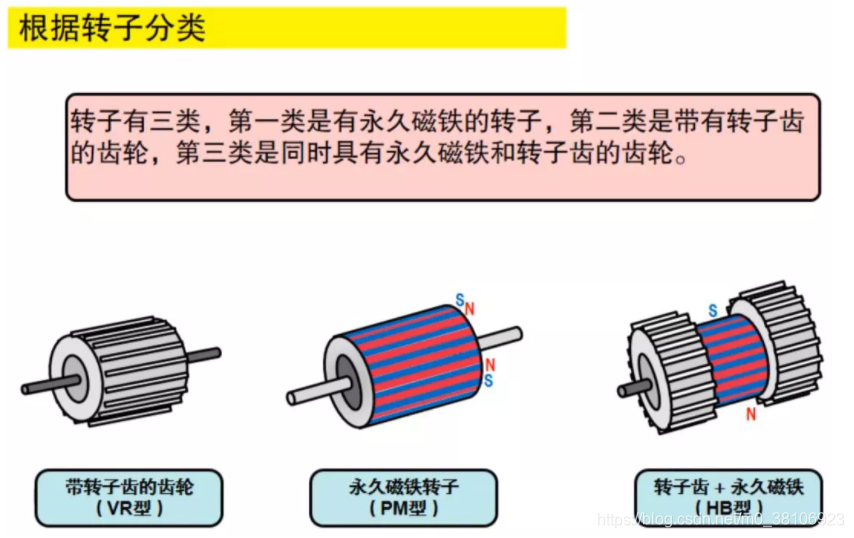
按照转子分类,有三种主要类型:反应式(VR型)、永磁式(PM型)、混合式(HB型)。
反应式
定子上有绕组,绕组由软磁材料组成。其结构简单、成本低、步距角小,可达1.2度,但动态性能差,效率低、发热大,可靠性难以保证。
永磁式
永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机度差,步距角大(一般为7.5度或15度)。
混合式
混合式步进电机综合了反应式和永磁式的优点,其定子上有很多相绕组,转子上采用永磁材料,转子和定子均有多个小齿以提高步距精度。其特点是输出力矩大、动态性能好、步距角小,但结构复杂、成本相对较高。
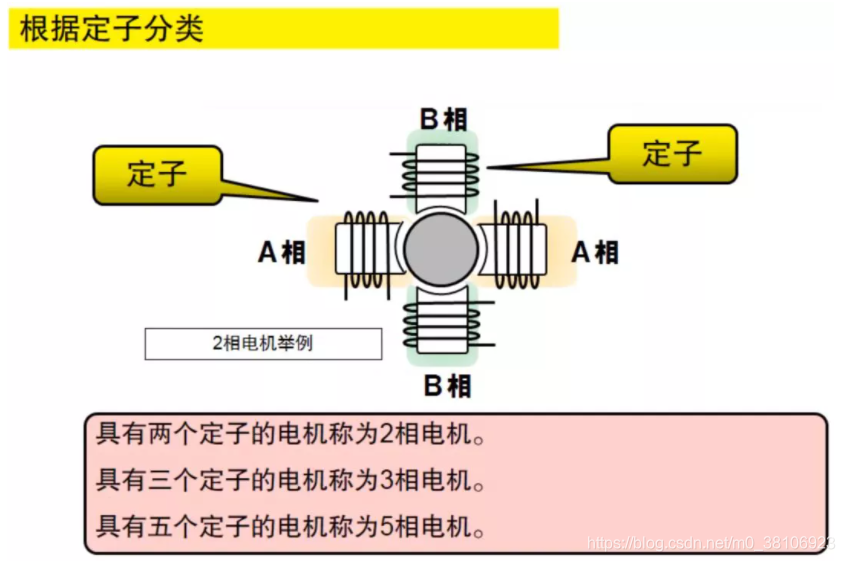
步进电机按照定子上绕组来分类,共有二相、三相和五相等系列。目前最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。
该种电机的基本步距角为1.8度/步,配上半步驱动器后,步距角减少为0.9度,配上细分驱动器后。其步距角可细分达256倍(0.007度/微步)。由于摩檫力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变精度的效果。
4、步进电机的工作原理
步进电机是通过脉冲信号来进行控制,每输入一个脉冲信号,步进电机前进一步。步进电机旋转的步距角,是在电机结构的基础上等比例控制产生的,如果控制电路的细分控制不变,那么步进旋转的步距角在理论上是一个固定的角度。在实际工作中,电机旋转的步距角会有微小的差别,主要是由于电机结构上的固定有误差产生的,而且这种误差不会积累。
步进电机的总极数越大,加工精度的要求就会越高。通常工业用混合型步进电机的步距角是1.8度,就是200极。

步进电机的相电流及磁场,遵循安培右手螺旋定律,由电能产生磁场能量,控制电机相电流,就能使电机定子的磁极方向发生反转,二相磁场的变化相配合,进而产生电机的旋转。
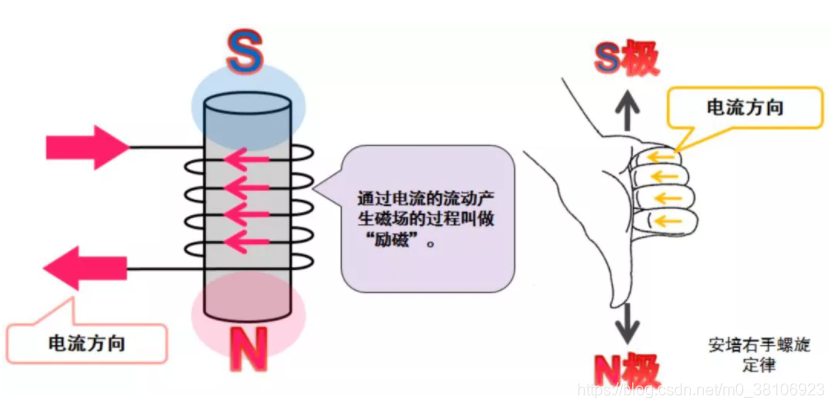
如果电流方向发生变化,磁极的方向也会发生变化,步进电机的电流流过定子产生磁场的过程叫做励磁。
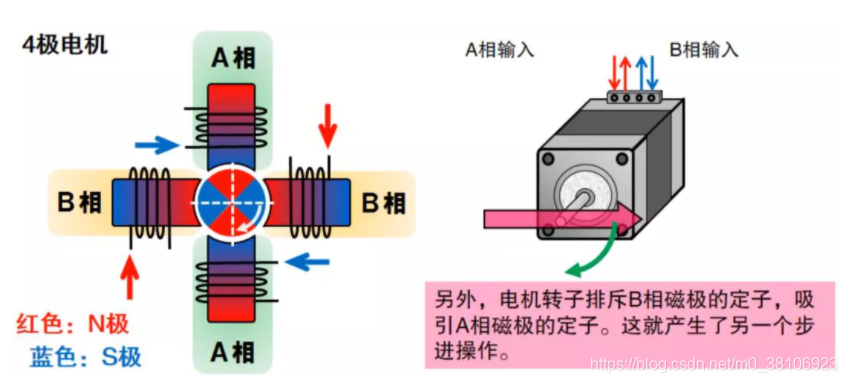
通常所说的二相步进电机,电机转子的旋转,包含不同磁极的磁场相斥和相吸实现的。如下图所示,A相产生N极磁场吸引转子的S极,B相产生S极磁场吸引转子的N极,使定子产生旋转的动力。如果改变A、B相定子线圈的电流方向,电机会产生另一步的旋转。连续改变A、B相定子线圈的电流方向,电机会产生连续的旋转。
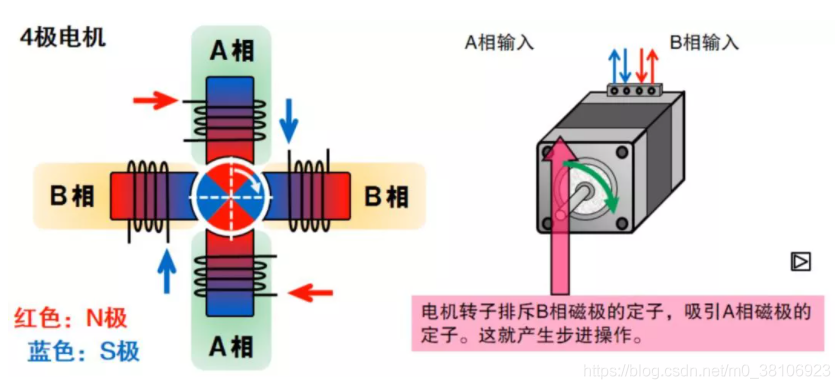
电机的运动是通过改变电流在电机中的流动来实现的,电子转子排斥B相磁极的定子,吸引A相磁极的定子,这就产生了另一个步进操作,如下图所示:
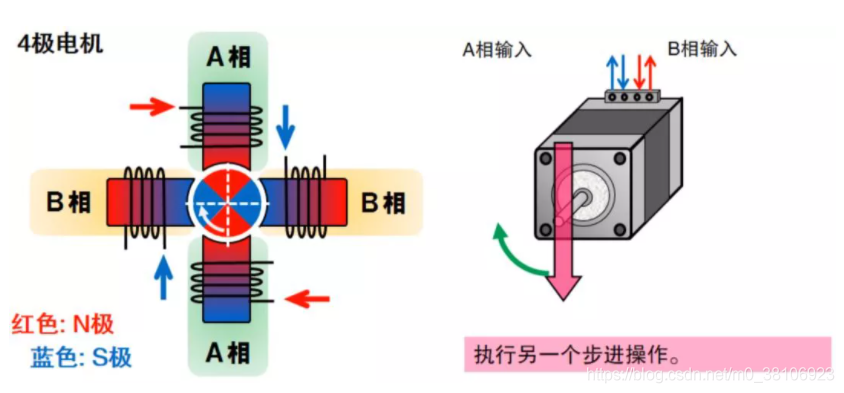
执行另一个步进操作,电机定子磁极反转,转子排斥B相磁极的定子,吸引A相磁极的定子,如下图所示:
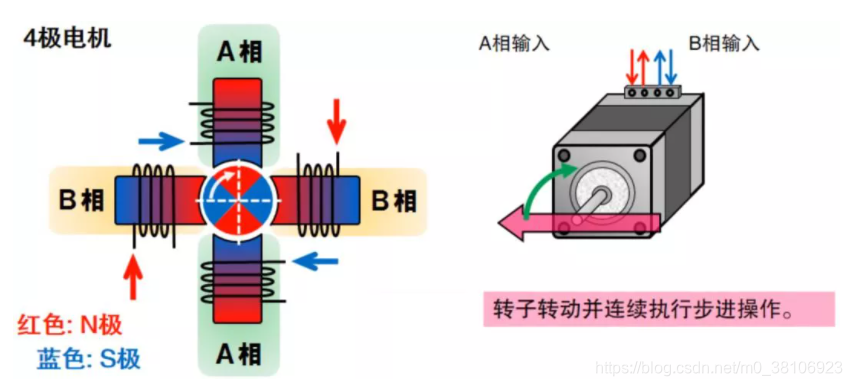
定子线圈中的电流方向无论何时发生变化,磁极将会反转,转子重复步进操作。东芝步进电机驱动控制电路对电机的磁场励磁的控制,是通过脉宽调制方式实现的,能够实现电机高效、稳定的运行。如下图所示:
5、步进电机的操作模式
步进电机的基本操作模式称为“励磁模式”,能够使步进电机工作在全步模式、半步模式和微步模式,其中微步模式能够有效的降低步进电机相电流的噪声,能够改善步进电机固有的噪声震动问题。下面将介绍3种励磁模式。
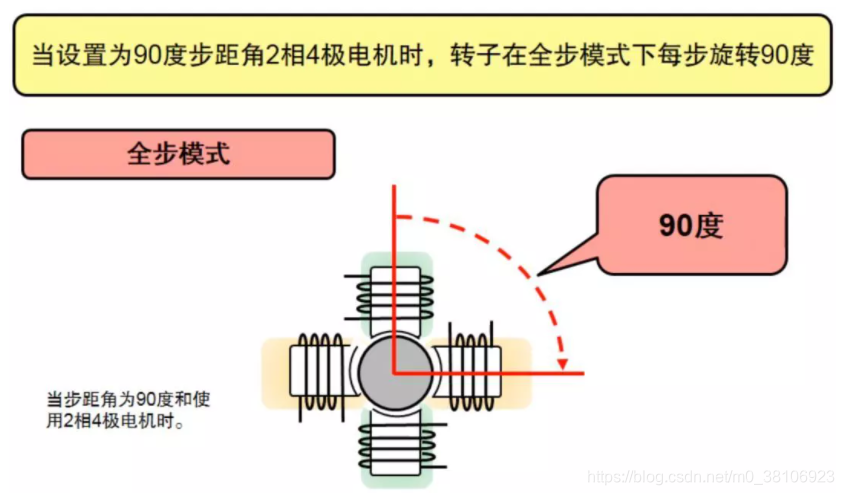
全步模式
所谓全步模式,就是依据电机固有结构设计固定的步距角工作,一个电脉冲,步进电机前进一个步距角。这个步距角使电机设计结构所决定的,也可以理解为电机以最大的步距角旋转。
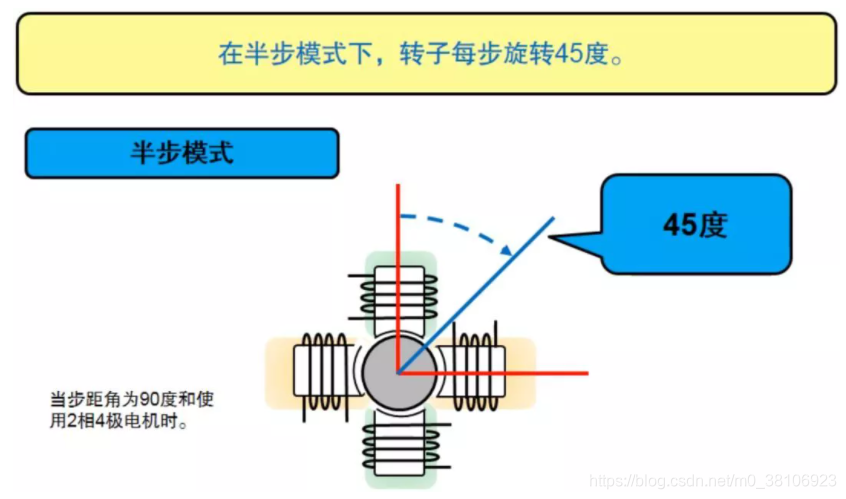
半步模式
半步模式是以电机固有的结构决定的步距角的一半角度进行步进旋转。如下图所示,步进电机的总极数是4级,对应的步距角是90度,那么半步模式下,步进电机每个脉冲旋转45度。
微步模式
微步模式类似于半步模式,步距角更小,就是1/4步、1/8步、1/16步,可以到很高的细分。对应的步进角度就是在整步步距角乘以微步系数。

步进电机的步距角越小,需要的加工精度会越高,对应的微步时的步进角度的误差会越大。
6、电机控制驱动
步进电机不能直接接到工频交流或直流电源上工作,而必须使用专用的步进电机驱动器,它有脉冲发生控制单元、功率驱动单元、保护单元等组成。如下图所示:
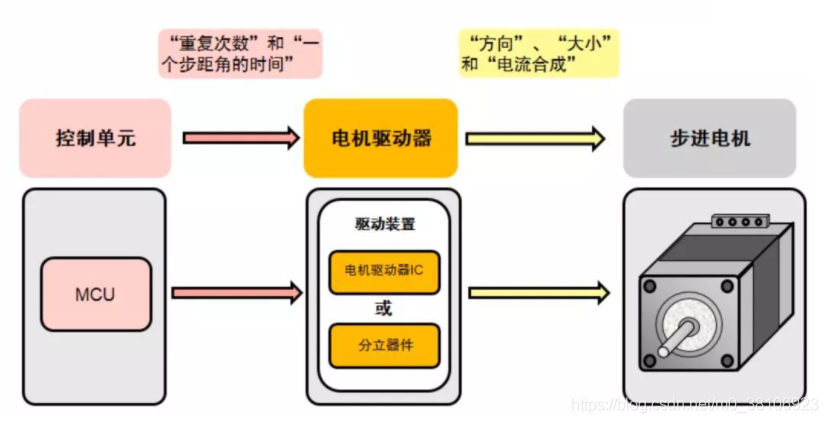
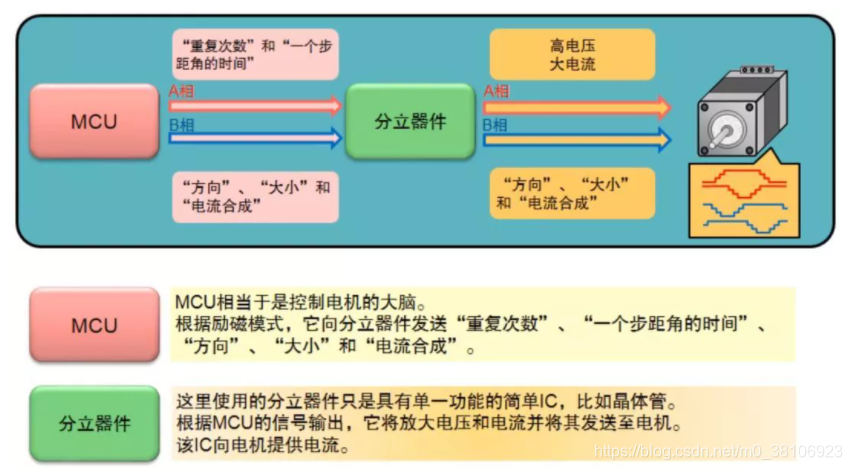
驱动单元与步进电机直接耦合,也可以理解成步进电机微机控制器的功率接口。下面将使用MCU和分离元器件的系统举例说明。MCU相当于是控制电机的大脑,它向分立器件发送电机的步距角时间、转动方向和重复次数等,而分立器件根据MCU发出的信号,将放大电压和电流并将其发送至电机,从而驱动电机转动。
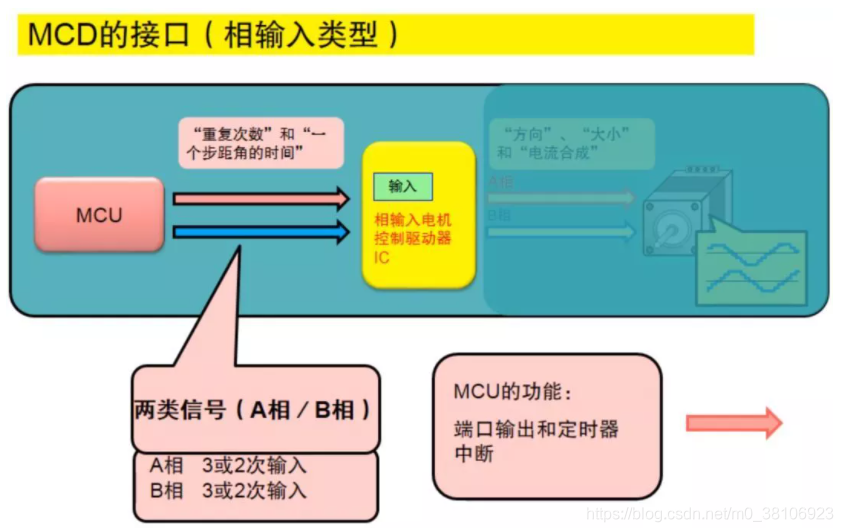
如下图所示,该系统使用了MCU和电机控制驱动器IC。从输入控制信号来区分,步进电机控制器IC可以分为相入力型和时钟入力型。相入力型是指电机的每个励磁相的电流方向由输入信号控制,而时钟入力型是指电机的驱动由脉冲信号来控制。
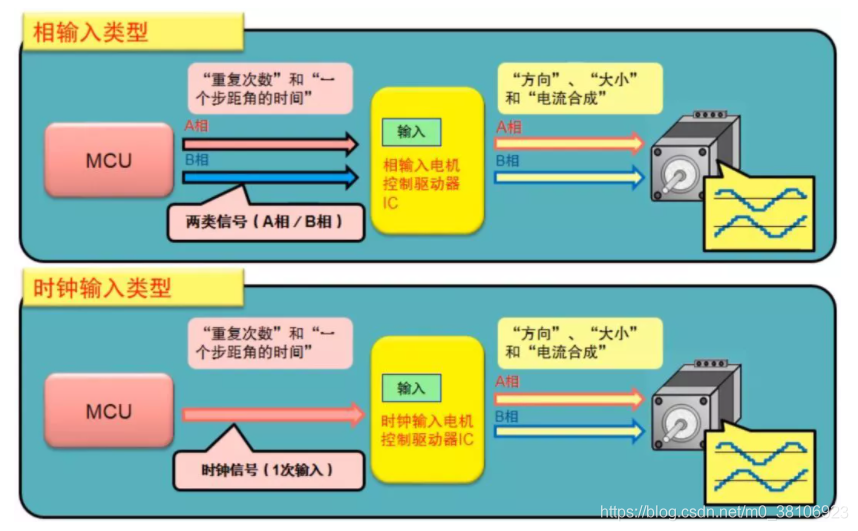
相入力型
相入力型电机驱动器需要A和B两相的控制信号,只需要时钟信号,需要控制信号的MCU做更多的运输工作。
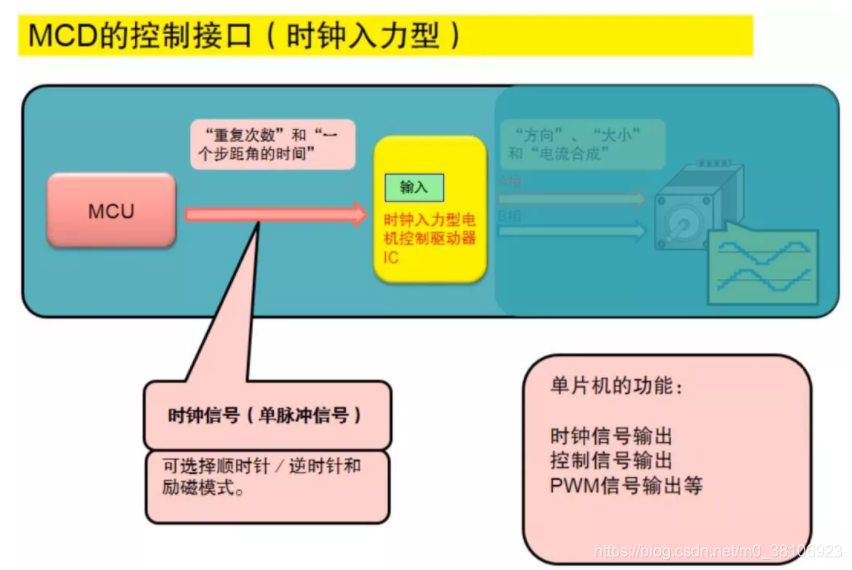
时钟入力型
时钟入力型电机驱动器的控制接口,需要时钟信号(单脉冲信号)输入,其控制信号相对简单,MCU的资源占用较少。
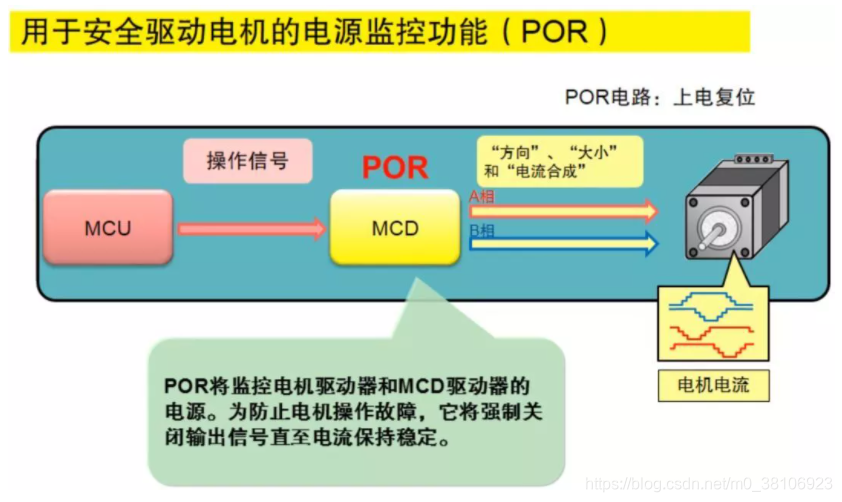
上电复位功能(POR)
上电复位功能将监控电机驱动器,以及电机驱动控制器的电源。为防止电机操作故障,它将强制关闭输出信号直至供电电压保持稳定。如下图所示:
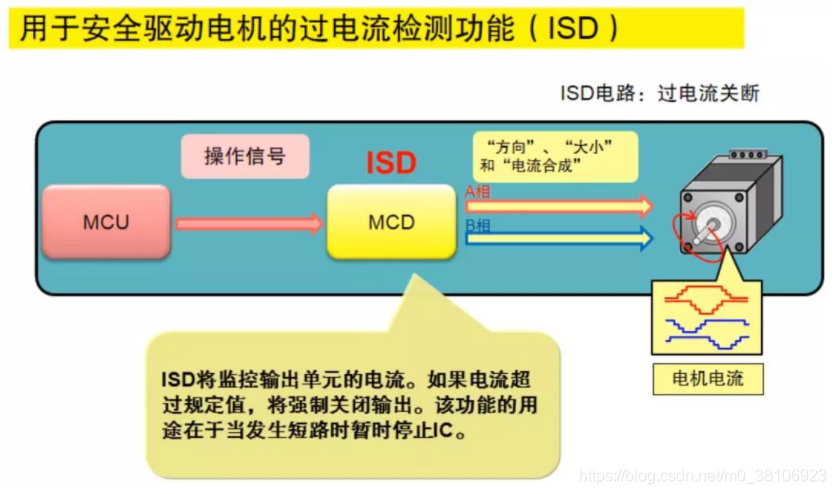
过电流检测功能(ISD)
过电流关断功能将监控输出单元的电流,如果电流超过规定值,将强制关闭输出,该功能的用途在于当发生短路时暂时停止IC输出。如下图所示:
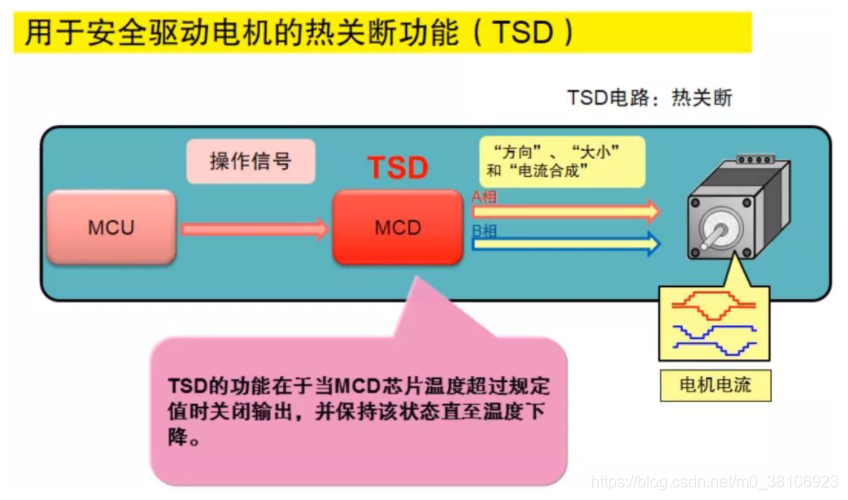
热关断功能(TSD)
热关断功能在于,当电机控制驱动器芯片温度超过规定值时关闭输出,并保持该状态直至温度下降。
本文整理来源:东芝半导体
拓展学习:无刷电机与有刷电机的区别
文章来源: handsome-man.blog.csdn.net,作者:不脱发的程序猿,版权归原作者所有,如需转载,请联系作者。
原文链接:handsome-man.blog.csdn.net/article/details/109821221