
第二章 研究方法
A.参与者
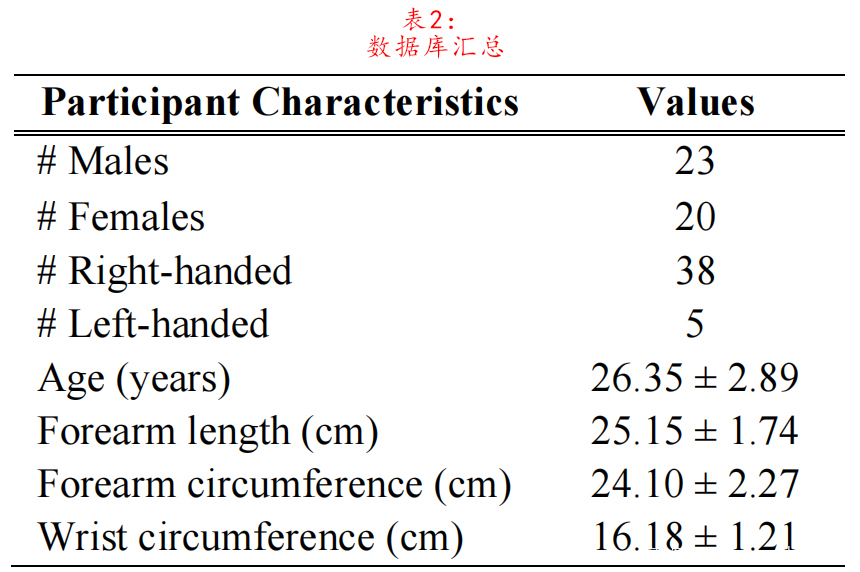
我们招募了43名健康参与者(23名男性,20名女性)进行这项研究。平均年龄为(26.35±2.89)岁,平均前臂长度(从手腕上的指状突到肘部的肩胛骨测量)为(25.15±1.74)厘米。关于数据集和参与者特征的更多细节,见表二。实验前,参与者被告知实验程序并签署了一份知情同意书。实验是按照《赫尔辛基宣言》进行的,研究方案得到了滑铁卢大学研究伦理办公室的批准(ORE#31346)。
B.采集设置
实验装置包括一台个人电脑和一台显示器,安装在一张桌子上,距离高度可调的椅子0.75米。EMGUSB2+(OT Bioelettronica,意大利),一个商业放大器,被用来获取sEMG信号。信号在10赫兹和500赫兹之间进行带通滤波,增益为500,然后以2048赫兹采样。
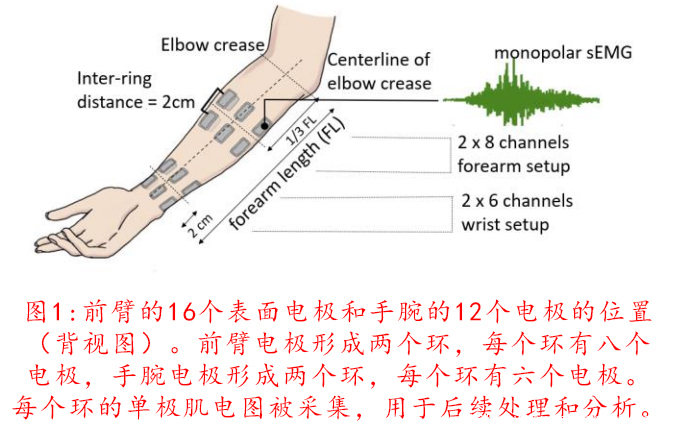
在实验之前,受试者从尺骨茎突到尺骨鹰嘴之间的距离作为前臂长度被测量。前臂周长的测量是在尺骨鹰嘴到前臂三分之一处进行的。手腕周长是在距离尺骨茎突2厘米处测量的。这些测量完成后,将电极放在前臂和手腕上。对于前臂电极的放置,16个单极sEMG电极(AM-N00S/E,Ambu,丹麦)以两个环的形式放置,每个环由8个电极组成,均匀分布在前臂周围,形成8个双极对。两个环之间中心到中心的距离保持在2厘米。对于手腕的电极设置,12个与前臂环相同类型的单极sEMG电极以两个环的形式放置,每个环由六个电极组成,平均分布在手腕周围,形成6个双极对。两个环之间中心到中心的距离保持在2厘米,与前臂设置相似。因此,每个阶段共使用了28个单极sEMG电极。图中提供了详细的图示说明。1,而实际的电极定位见附录一。图1中提供了详细的图示说明,而实际的电极定位则可参考附录一。为了保持所有参与者的电极位置的一致性,每个环中的第一个电极(总环数=4)结构上被定位在肘部皱褶的中心线上,如图1所示[6,11]。
C.实验方案
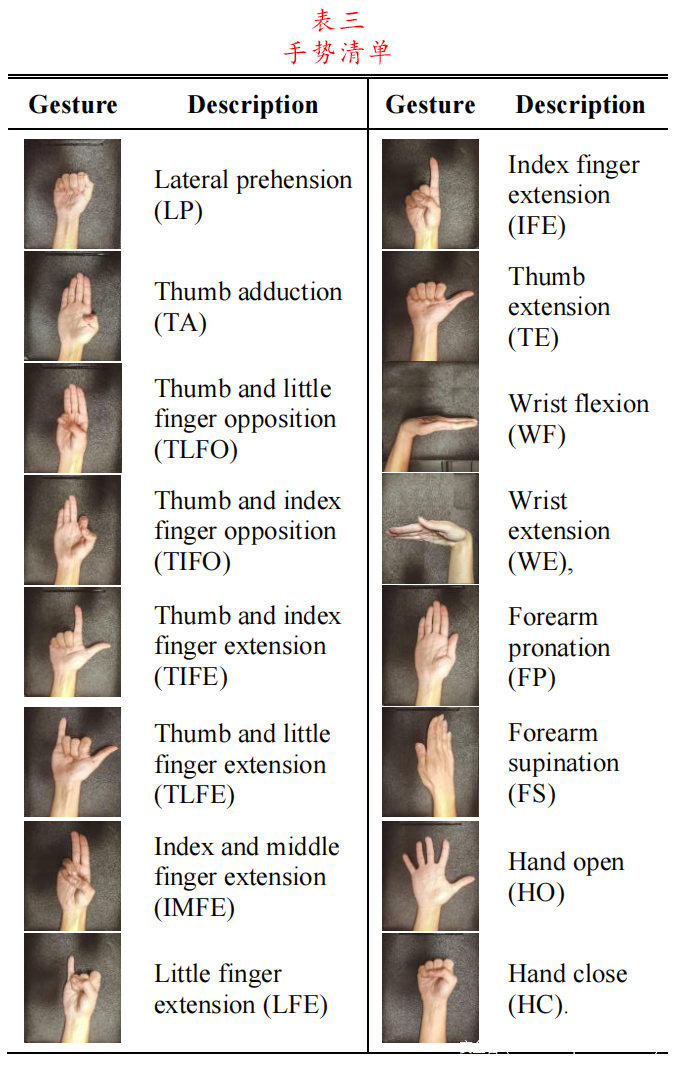
仪器设置完成后,受试者舒适地坐在椅子上,双上肢呈休息姿势。在参与者面前放置的电脑屏幕上,提供了执行这些手势的视觉指示。目前的研究包括以下16种手部和手腕姿势(见表三):侧抓握(LP),拇指内收(TA),拇指和小指对握(TLFO),拇指和食指对握(TIFO),拇指和小指伸展(TLFE),拇指和食指伸展(TIFE),食指和中指伸展(IMFE),小指伸展(LFE),食指伸展(IFE),拇指伸展(TE),手腕屈曲(WF),手腕伸展(WE),前臂旋后(FS),前臂旋前(FP),手打开(HO),手合拢(HC)。16个手势的顺序是随机的,休息(REST)试验是在所有16个手势都做完一次后收集的。每次试验之间都有10秒钟的放松时间。17个手势(包括REST)的连续数据采集被称为一次运行。每个受试者进行七次运行,因而有119次试验或收缩(17 x 7)。当受试者觉得有必要时,也可以要求额外的休息。
D.sEMG信号处理
对于每个前臂近端环的设置(通道数=8)和手腕远端环的设置(通道数=6),单极SEMG信号首先通过一个共同的平均程序重新引用。然后将处理后的信号分割成200ms宽的窗口,并有150ms的重叠。然后使用分频技术(FDT)特征提取[25]对每个窗口进行处理。这种方法计算了L频段的幅度。对于ith个频段,设fi,1和fi,E表示两个端点的频率值。因此,对于每个窗口,ith特征的计算方法为:

其中X(·)表示FFT频谱的幅度,F[·]表示非线性变换,以获得一个平滑值,从而获得更好的分类结果。在这项研究中,使用了对数运算符。在目前的研究中,EMG的整个频段(20-450 Hz)被细分为六个等宽的频段:20-92,92-163,163-235,235-307,307-378和378-450 Hz,与先前的研究一致[26]。因此,对于前臂上的8个通道和手腕上的6个通道,从每个窗口提取的特征向量分别由前臂和腕环的48和36个FDT特征组成。
由于来自相邻通道的EMG信号之间有很高的相似性,提取的特征会有很高的相关性。考虑到特征之间相关性,Mahalanobis距离被考虑用于生物识别比较[6, 7, 11]。对于一个给定的特征向量样本P,即一个特定用户(申请人)在做特定手势时的输入,其与ith手势和jth用户的匹配分数Si,j,被定义为样本和类中心点之间的Mahalanobis距离:

其中μi,j是该类和用户的手势的中心点,∑i,j是特定手势和用户类的协方差矩阵。中心点和协方差都是根据日内和跨日分析从登入数据中估计出来的(详情见第二节G)。
E.多码框架
一个标准的生物识别认证系统由四个模块组成:1)传感器模块,收集生物识别数据;2)特征提取器,用于生成用作生物识别条目的特征向量;3) 匹配器模块,与真实用户的模板进行比较,以生成分数;4) 决策模块,根据预先设定的阈值来授予访问或拒绝。研究了基于EMG的生物特征认证中不同模块的融合策略,发现基于决策级别的融合方法具有最佳的综合性能[7]。在EMG生物识别技术的背景下,所做的手/腕部手势被当作代码来处理。一个码长为M的用户认证码序列的例子可以表示为[C1, C2…Cm, CM] ,其中Cm是mth码(手势)。在下面的分析中,从每个参与者所做的16个手势中随机选择6个手势进行组合,产生了50个随机序列。如下文所述,对每个代码序列进行决策级融合[7],并通过改变代码长度从1~6(M=1, 2, 3…6)来比较评估指标。
多代码框架中的M代码使用了加权多数方案。在验证/认证模式下,申请的用户与数据库中相应的模板进行比较。因此,认证结果是二进制的:1(真正的用户)和0(冒名顶替者)。对于M代码,设dm,j是确定性程度或mth代码(Cm)以及jth用户定义为:

通过加权表决得到的每个用户”j “的判别函数为:

其中Wm是附加在mth代码上的权重。这个值是通过对每个手势的单码识别准确率在三天内的平均值来获得的。基于M的值,Wm被归一化为1。

在认证系统的情况下,如果判别式g占多数(>50%),则呈现的用户与模板匹配。权重Wm将由Cm的识别精准度来确定,并归一化。
F.性能评估
计算错误接受率(FAR)和错误拒绝率(FRR)来评估生物识别认证。FAR是接受冒名顶替者的比率,FRR是拒绝真实用户的比率。原则上,在生物识别应用中,FAR和FRR应该尽可能小。检测误差权衡曲线(DEC)是检测FAR和FRR之间的关系。等错率(EER)是DEC曲线上FAR等于FRR的那一点。EER是一个常用的认证指标,可用于比较不同生物特征的性能:EER值越低,性能越好。为了准确评估EMG生物识别技术的生物认证能力,我们调查了两种常见的认证情况:1)正常测试:正确的代码序列只有真正的用户知道,而冒名顶替者对代码序列一无所知,并呈现出与真正的用户使用的代码序列不同的随机序列;2) 泄露测试:真正的用户的正确代码序列被泄露了,而冒名顶替者通过执行相应的手势呈现正确的代码序列。
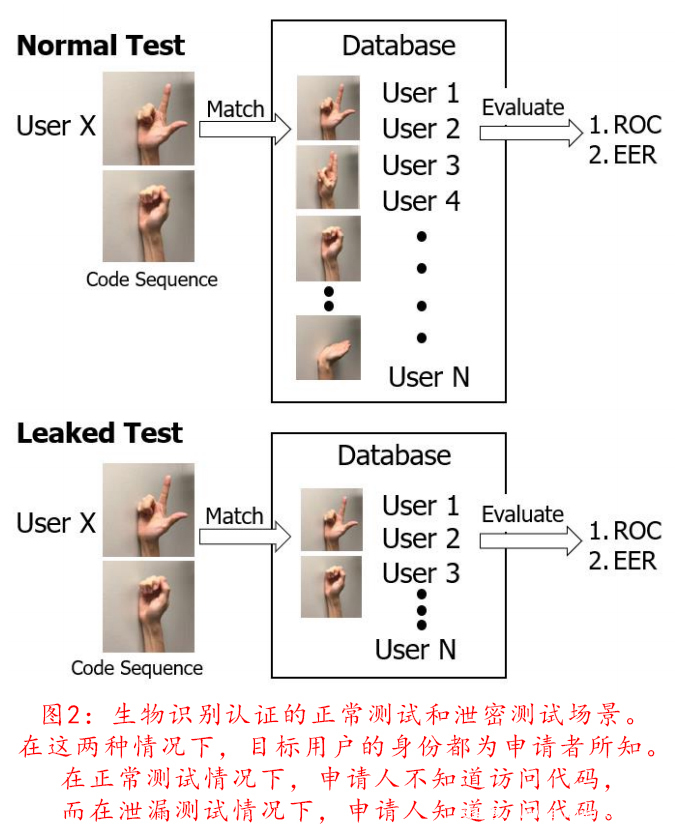
在这两种情况下,对于mth代码,真正的得分,Gm,是从真正的用户的认证手势Gm中获得的。在正常测试中,冒名顶替者的分数Im是由其他用户所做的其他手势获得的。对于泄露测试场景,所有其他用户的Im都是从Cm获得的。使用Gm和Im实施融合方案,以获得最终的FARM、FRRM和EERM。
G. 日内和跨日分析
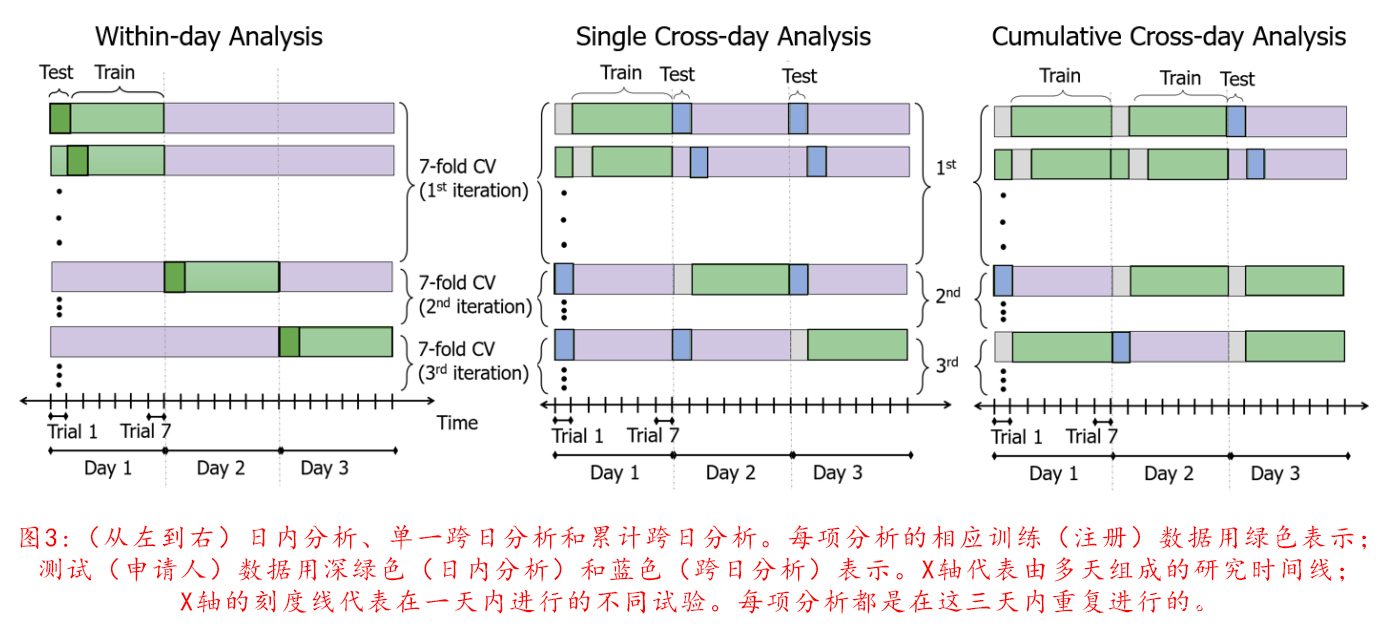
在目前的研究中,每个用户的数据是在三个不同的日子里收集的,包括每7次试验和每次试验中的16个手势。生物识别认证性能评估包括日内分析和两个独立的跨日分析(单一跨日分析和累积跨日分析)。对于日内分析,每天的六次手势试验被用作登记数据(训练),当天剩余的一次试验被用作申请数据(测试),从而形成了留一法(LOO)交叉验证方案,相当于七次交叉验证。如第二节F部分所述,对每个折叠的认证性能进行了估计。每三天重复一次交叉验证,并报告平均性能指标。
对于单一的跨日分析,一天中的六次手势试验被用作登记数据,其余两天中每天的一次试验数据被用作申请人数据。这个步骤重复了七次,通过改变特定日期的登记和申请人试验,从而产生了重复的七次交叉验证。每天重复交叉验证三次,并报告平均认证性能。
在跨日累积分析中,每三日中的两天的6次手势试验被用作登记数据,而剩下一天中1次试验数据被用作申请人数据。通过改变特定日期的登记和申请人试验,对所有七个试验进行了七次交叉验证。每天重复交叉验证三次,并报告平均认证性能。图3提供了日内、单次跨日和累积跨日分析的图表。
H.统计分析
该研究旨在研究前臂和手腕EMG生物识别系统的日内和跨日认证性能。此外,通过改变编码长度来分析这种多编码生物识别系统的性能。对于三种分析方案中的每一种,即日内、单次跨日和累计跨日,对认证系统的EER进行重复测量方差分析,以确定电极位置(两级,即前臂设置和手腕设置)和编码长度(六级,即从一到六)是否有任何显著影响。在其中一个因素显著的情况下,其他因素的水平被依次固定,并对显著的因素进行Bonferroni事后比较分析。所有的统计学测试都是用RStudio 1.0. 136 (RStudio, Boston, MA)进行的。
I.GrabMyo数据集和样例代码的摘要
所有的数据文件及其描述都在附录二中。数据集将在两个开放访问的资料库PhsioNet和IEEE数据端口中提供。对于PhysioNet数据库,所有EMG信号文件被保存为.dat和.hea文件,对于IEEE数据库,信号文件被保存为.mat文件。手势信息和每个试验的顺序以.txt文件的形式提供。提供了将数据读入Matlab和Python以及实现基本EMG信号处理的示例代码。每个样本代码的前几行都提供了关于如何使用这些代码的指导。此外,在readme.txt文件中还提供了数据描述和代码使用的手册。
参考文献
[6] J. He and N. Jiang, “Biometric From Surface Electromyogram (sEMG): Feasibility of User Verification and Identification Based on Gesture Recognition,” Frontiers in Bioengineering and Biotechnology, vol. 8, p. 58, 2020.
[7] A. Pradhan, J. He, and N. Jiang, “Score, Rank, and Decision-Level Fusion Strategies of Multicode Electromyogram-based Verification and Identification Biometrics,” IEEE Journal of Biomedical and Health Informatics, 2021.
[11] A. Pradhan, J. He, and N. Jiang, “Performance Optimization of Surface Electromyography based Biometric Sensing System for both Verification and Identification,” IEEE Sensors Journal, 2021.
[25]A. Pradhan, N. Jiang, V. Chester, and U. Kuruganti, “Linear regression with frequency division technique for robust simultaneous and proportional myoelectric control during medium and high contraction-level variation,” Biomedical Signal Processing and Control, vol. 61, p. 101984, 2020.
[26]J. He, D. Zhang, X. Sheng, S. Li, and X. Zhu, “Invariant surface EMG feature against varying contraction level for myoelectric control based on muscle coordination,” IEEE journal of biomedical and health informatics, vol. 19, no. 3, pp. 874-882, 2015.